胸怀科研梦 奋斗勇创新
——北理工智能地面移动机器人创新团队
发布日期:2014-05-25 供稿:校团委 摄影:自动化学院
编辑:新闻中心 辛嘉洋 阅读次数:

近日,由共青团中央负责发起组织,中国青少年科技创新奖励基金支持的2014年大学生“小平科技创新团队”评选揭晓,我校自动化学院智能地面移动机器人创新团队入选大学生“小平科技创新团队”,获得中国青少年科技创新奖励基金资助。
推开华体会hth·(体育)(中国)官方网站-华体会体育hth首页自动化学院组合导航与智能导航研究室的大门,就能看见桌子上摆满的各种机器零部件,几个大男孩“两耳不闻窗外事,一心只画设计图”。这里,就是北理工智能地面移动机器人创新团队的基地。
2010年,第一批志同道合的学子聚集在这里,怀着一颗热爱科技创新的心,团队成员们齐心协力,众志成城,秉承踏实肯干的科研作风,在团队课题上发挥自己的创新思维,围绕“蛙板机器人”和“IN2BOT智能车”两大研究平台,开展创新实践活动。
经过近年来研究工作的积累,主要成员已形成以地面移动机器人与智能导航技术为主的稳定研究方向。为了让来自不同专业、年级的同学尽快参与项目,团队采用“蛙板机器人”小组由博士生带领,本科生为主力,“IN2BOT智能车队”由博士生带领,研究生为主力的基本模式,使团队中的队员都能逐步参与到创新实践中,这样的跨年级人员梯队培养机制也为团队创新成果的延续铺就了坚实的道路。
华体会hth·(体育)(中国)官方网站-华体会体育hth首页自动化学院“组合导航与智能导航实验室”为团队提供了优越的科研条件。一个全天候对内开放的创新实验室,一个宽敞的智能车实验场地,专门构建的两栖蛙板机器人水陆实验环境,实验仪器、器材齐备应有尽有。同时,实验室还与多个企业和研究所建立了长期稳定的合作关系,为团队的科研创新创造了良好的科研环境和学术氛围。在三位老师的悉心指导下,智能地面移动机器人创新团队攻克了一个又一个难关,在科研创新的道路上不断前行。
在两个基础研究项目——“蛙板机器人”和“智能车”的研究过程中,充满了令人难忘的感人瞬间,每当队员们回忆起的时候,昨天一起奋斗的场景仿佛都历历在目。

图1 两栖蛙板机器人(左),IN2BOT智能车(右)
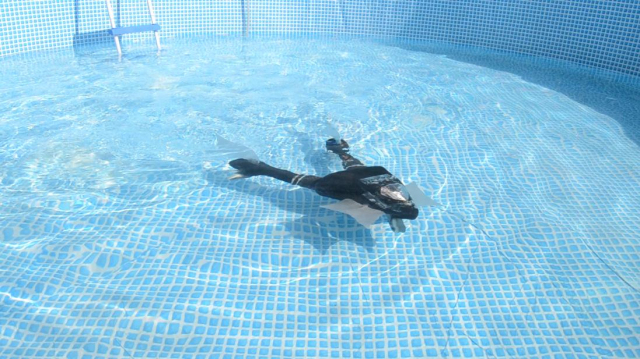
图2 智能蛙板机器人
蛙板机器人——闪耀“挑战杯”
蛙板机器人,造型古怪富有创意,借鉴了蛙泳的运动形式——一种双摆臂的运动形式,并通过这种运动形式实现了世界上首例水陆两栖运动形式统一的两栖机器人。机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;既可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。
在2011年第十二届“挑战杯”全国大学生课外学术科技作品竞赛上,历经一年完成的智能蛙板机器人揭开了它的神秘面纱。参赛者宗民感慨万千地说,“我们在做这个机器人的过程中遇到了很多问题:机械结构的设计、加工与制作,运动的仿真,算法的设计,调试等等。因为电机出了问题,我们在比赛前一周才有了调试时间。“确实,与其他参赛作品不同,该机器人是团队的原创,在很多方面都需要自己去探索,甚至包括运动方式的可行性。依靠着十足的创新性,机器人最终赢取了评委的掌声,获得了一等奖。
两年后,在智能蛙板机器人的基础上,团队对其进行了重大的改进与研究,使机器人从陆地运动形式转变为水陆两栖统一的运动形式,在很大程度上提高了机器人的运动能力和工作范围。团队也参加了2013年第十三届“挑战杯”全国大学生课外学术科技作品竞赛,并获得了评委的一致好评,再次取得了一等奖的佳绩。

图3 两栖蛙板机器人
(黑色的是第一代两栖蛙板机器人;花色的是第二代两栖蛙板机器人。)
两栖蛙板机器人的制作过程充满了艰辛。在两代两栖机器人的制作以及调试过程中,团队成员遇到了很多困难:机械干涉问题、外壳难以安装、电机老化极其损坏、烧坏电路板、程序调试难题、信号干扰……;同时机械零件的绘制、外壳模型的建立与绘制、机器人的整体安装、加工厂的寻找、合同的签订、方案的制定……每一个过程都需要团队成员们亲力亲为。在这期间,团队成员夜以继日的奋斗在实验室,不顾课业繁重辛苦,不顾偌大的校园东西奔波,他们住在一起,学在一起,讨论在一起,一有时间就学习、讨论,时间的积累,沉淀的不仅是厚厚的知识更是浓浓的友情。在指导老师的指导与要求下,团队成员一步步完善机器人的性能以及内部结构,用实际行动和100%的精力去实现自己的挑战杯之梦。

图4 蛙板机器人调试过程
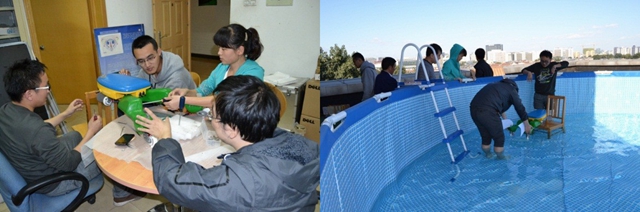
图5 蛙板机器人水下实验
成员张剑青骄傲地说:“在这个过程中,我们都成长了不少。我们的团队意识以及科研能力都得到了足够地锻炼,挑战杯是一次难得的比赛,我们得庆幸拥有这次难得的机会!”,一年的艰苦过程,团队成员间相互学习、相互讨论,每个成员都取得了长足的进步。
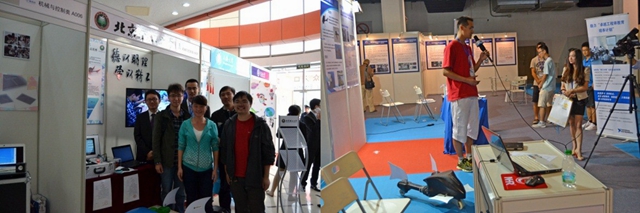
图6 第13届挑战杯现场(左),团队成员接受电视台采访(右)
虽然已经斩获两次挑战杯一等奖,但是蛙板机器人的研究还在继续。研制期间,团队多次受邀参加国际性展览会,并获得了专家们的一致好评。有几家船舶公司与某科研公司向团队表达了强烈的合作意向,团队欣然接受。接下来,团队将对其运动形式以及多目标协同方面做进一步的研究,使机器人的性能更加完善、成熟。
智能车——后来者居上
2012年“中国智能车未来挑战赛”上,一辆外表奇特的智能车引起大家浓厚的兴趣,也得到了央视的特写镜头。

图7 2012年中国智能车未来挑战赛精彩画面
该车就是来自本团队的“波特号”智能车。2012年,团队在未来挑战赛的舞台上的首次亮相,取得了第六名的好成绩。作为后来者,团队成员用顽强的斗志克服了在技术、经验以及参赛规则上的欠缺。
“快比赛时他们在良乡校区调试了一两个月,回来的时候我看到杨老师的胡子头发都长的很长了,而且人也瘦了不少。”一位学生如是形容指导老师杨毅。“确实,这中间团队成员吃了不少苦,但是在科学面前团队成员无怨无悔,我们追求的是更高、更强。我们来年还会继续战斗的!”赛后队员朱昊说道。辉煌的成就背后是艰辛的过程和挥洒的汗水,在研究期间,团队成员放弃寒暑假、国庆假期以及双休日,一直奋战在实验室,累了互相鼓励,困了轮流休息,一点点地攻克面前的难题。2013年全国智能车未来挑战赛, IN2BOT智能车队第二次如约参赛。这次团队派出的“特立独行号”智能车获得了城郊道路第五名,城区道路第四名,综合排名第五的成绩,并在中韩对抗赛中战胜了韩国首尔大学车队,完成了预期的任务,也算是对团队一年来的工作的一个认可。

图8 2013年中国智能车未来挑战赛比赛画面
“这一年来我们提高了不少:硬件上采用了世界上一些先进的技术,并且在原有的基础上又增加了一些功能,车辆本身的运行上更加稳定可靠;软件上算法更加严谨灵活,结构更加清晰,功能日趋完善。”队员王新宇说道。相比于“波特号”智能车,团队成员在保留原有可靠性能的基础上,对“特立独行号”智能车进行了很多方面的改进:底盘降低,使得性能更加可靠,运行起来更加平稳;续航能力方面,团队成员由以前的蓄电池驱动改进为了燃油驱动,使得车辆的行驶距离大大延长,由原先的几十公里到现在的无限制里程;算法方面,综合考虑了生活中驾驶员的多感官问题,由原先严格的运行模式切换改进为现在的多个传感器并行处理无切换模式等等。
“我记忆中最深刻的就是到达常熟后,团队成员没有一点休息时间。为了适应比赛赛道,在没比赛的时候团队成员基本整天都在调车。比赛日的时候,也是每天凌晨两三点就起床,到现场摸黑进行调试,生怕耽搁了宝贵的时间。那段日子真的够刻骨铭心的,虽然累得不行,不过也算是一个难忘的经历。”作为比赛选手,闫光对此深有体会。
两年两辆车,团队成员正一步一个脚印地迈进在无人汽车发展的道路上,技术日趋完善,成果愈加丰富。来年团队成员还会继续战斗,奋战在未来挑战赛的最前线!
经过4年多的发展,智能地面移动机器人创新团队在科学研究、科技竞赛、学术交流与学术梯度建设等方面都取得了显著的成绩,不仅在国内外期刊或会议上发表了一些高水平的论文,而且在各项创新大赛上都屡获佳绩,研究工作得到了多方的支持和肯定。其中《智能蛙板机器人》及其重大改进作品《两栖蛙板机器人》分别获得第12届、13届全国挑战杯学生课外学术科技作品竞赛一等奖;IN2BOT智能车分别获得了2012和2013年中国智能车未来挑战赛的第六名和第五名,特别是在2012年完成了本届比赛城区赛道上唯一一次超车(超越其他参赛智能车)。
成功的花,人们只惊羡她现时的美丽,可当初她的芽儿,却浸透了奋斗的泪水,洒满了牺牲的泪泉。在这个创新团队中,付出的是时间和汗水,收获的却是志同道合的队友和一生的难忘经历。回首那些共同挥洒汗水、共同奋斗拼搏的日子,打动我们的,不是那些奖项,而是那些创新的思路和过程中的坚持。千里之行始于足下,我们,在路上!
分享到: